






常见总线通讯协议:SPI、I2C、UART、USART、CAN、USB等
简介:介绍常见总线通讯协议:SPI、I2C、UART、USART、CAN、USB等。
一、SPI:串行外设接口
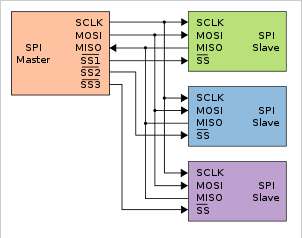
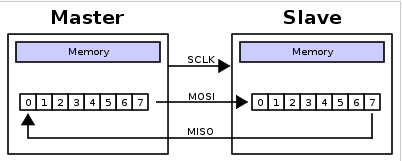
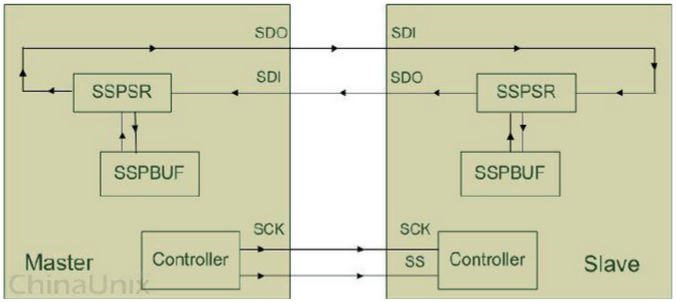
SPI(Serial Peripheral Interface)是一种由Motorola公司提出的串行同步通讯协议,由一个主设备和一个或多个从设备组成。其拥有四根(类)硬脚引线,分别为 SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS(片选)。因为一个主设备可以挂多个从设备,则通过片选引脚对从设备进行选择。从设备的工作时钟则是来自于主设备的SCK线。
1.1 电路示意图
1.2 数据的传输
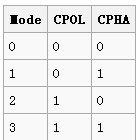
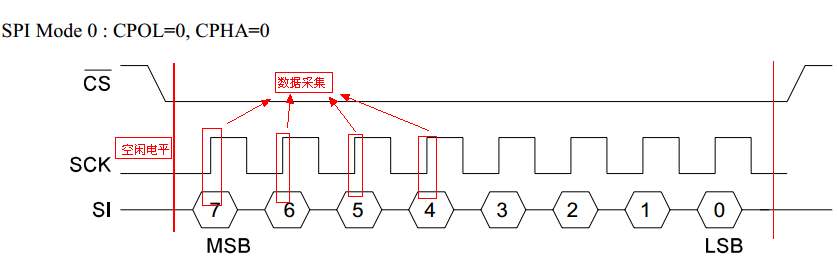
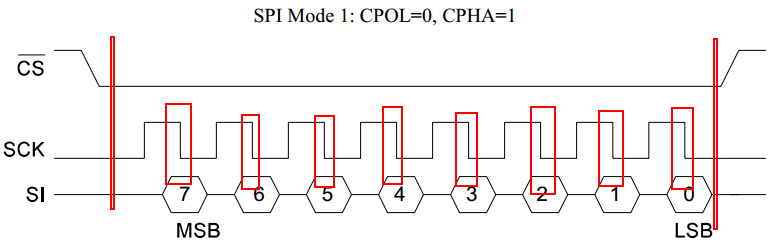
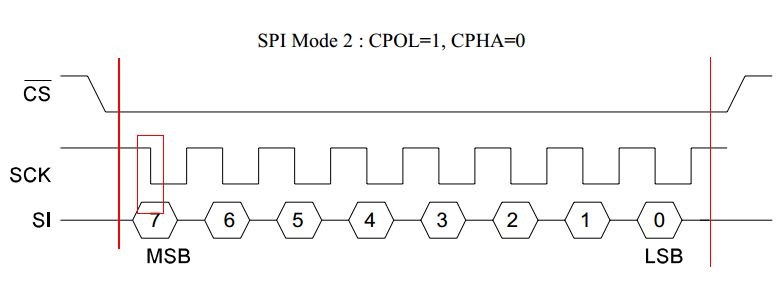
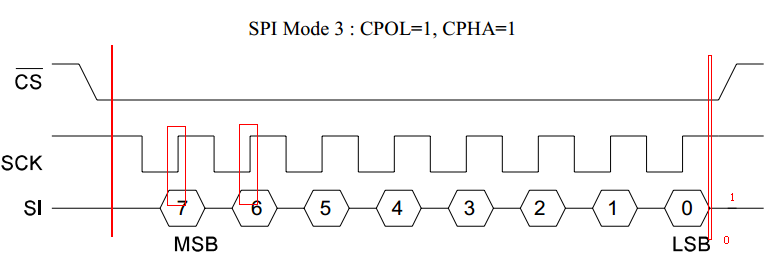
SPI在数据传输的时候,需要确定两件事情:其一,数据是在时钟的上升沿采集还是下降沿采集;其二,时钟的初始(空闲)状态是为高电平还是低电平。而I2C的空闲状态,时钟线为高电平;数据采集的时候,时钟线也为高电平。但SPI给出了更自由的方式。
CPOL:时钟极性, 表示 SPI 在空闲时, 时钟信号是高电平还是低电平。
CPHA:时钟相位, 表示 SPI 设备是在 SCK 管脚上的时钟信号变为上升沿时触发数据采样, 还是在时钟信号变为下降沿时触发数据采样。
那么,SPI CPOL有两种可能,CPHA有两种可能,则SPI数据传输就有四种可能—按照标准的说法,SPI数据传输就有四种模式。
1.3 SPI读写
SPI在硬件设计上采用的双数据线制,根据设计,在SPI通信过程中,主从设备之间会形成一个数据环形链路—也即是,主设备向从设备写一次数据,从设备就会回一次数据(至于该从设备回复的数据是否有效,则另当别论—如果有效,主设备就把它读入;如果无效,则丢弃即可)。
二、I2C:意为IC之间总线
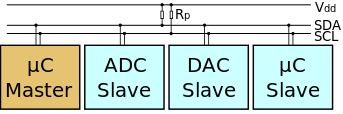
I²C (Inter-Integrated Circuit)。其拥有一根数据线SDA和一根时钟线SCL。其总线通过上拉电阻与电源相连接。每个接到I2C总线上的器件都有唯一的地址。其中,主动发起操作的一方为主机,另外一方为从机。
1.1 电路示意图
1.2 数据传输
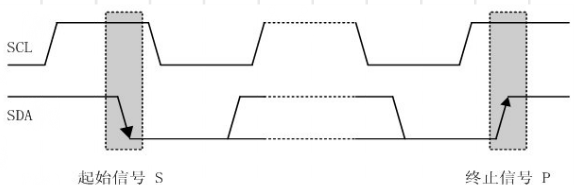
当没有数据传输的时候,两根总线都为高电平;当采集IIC上的数据时,其时钟线SCL必须是高电平且SDA的数据必须保持稳定不变—将SDA的电平与SCL的高电平进行“与”操作后,以便确定SDA上是1还是0;在SCL为低电平的时候,SDA上的数据可以进行跳变。
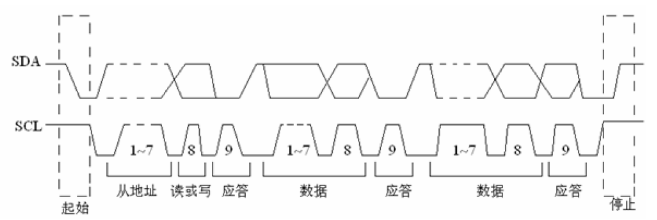
数据传输开始时,需要发送一个起始信号;数据传输结束后,需要发送一个终止信号;每8bit数据传输结束,都需要一个ACK。起止信号都有Master发出,而ACK则可能由Master或者SLAVE来发出。数据的传输采用大端传输。
开始信号:SCL为高电平,SDA的电平由高跳到低表示开始信号。
终止信号:SCL为高电平,SDA的电平由低跳到高表示终止信号。
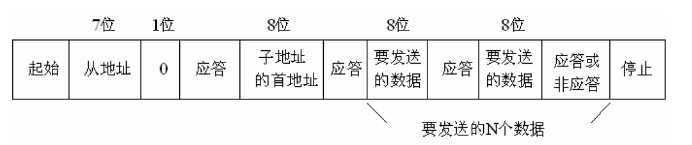
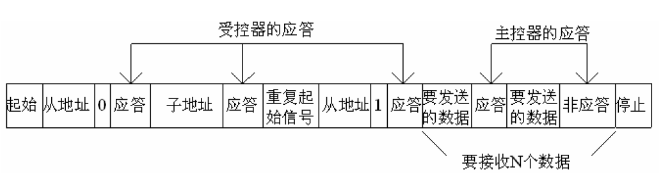
1.3 数据协议
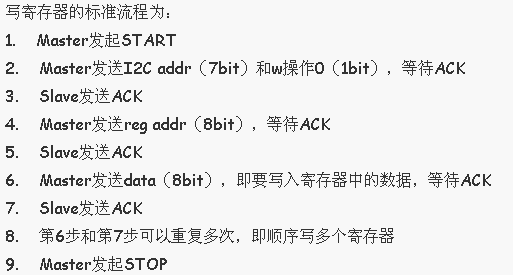
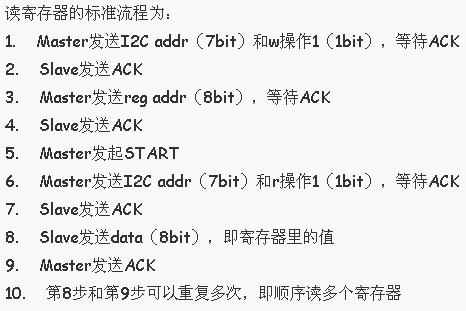
1.4 I2C读写流程
三、UART:通用异步收发器
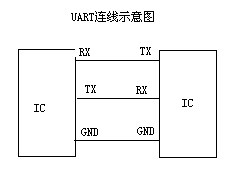
1.1 电路示意图
UART是一个大家族,其包括了RS232、RS499、RS423、RS422和RS485等接口标准规范和总线标准规范。它们的主要区别在于其各自的电平范围不相同。
嵌入式设备中常常使用到的是TTL、TTL转RS232的这种方式。常用的就三根引线:发送线TX、接收线RX、电平参考地线GND。
1.2 通信协议
将传输数据的每个字符一位接一位地传输。

起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。
数据位:紧接着起始位之后。数据位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。
奇偶校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。
停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。
波特率:数据传输的速率。有以下几个档位:300、600、1200、2400、4800、9600、19200、38400、43000、56000、57600、115200.当然也可以自定义。在数据传输和接收双方,需要预先统一波特率,以便正确的传输数据。
四、USART:通用同步异步收发器
USART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
1 | 1. 全双工操作(相互独立的接收数据和发送数据); |
五、CAN:现场总线
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
1 | CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性: |
六、LIN:局域互联网络
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
七、USB:通用串行总线
USB是英文Universal Serial BUS(通用串行总线)的缩写,是一个外部总线标准,用于规范电脑与外部设备的连接和通讯,是应用在PC 领域的接口技术。USB 接口支持设备的即 即用和热插拔功能。USB 是在1994 年底由尔、康柏.IBM、Microsoft 等多家公司联合提出的.USB的电气特性还有传输特性
八、GPIO:通用输入/输出
GPIO(General Purpose Input Output )为通用输入/输出,通用端口,总线扩展器, 利用工业标准I2C、SMBus™或SPI™接口简化了I/O口的扩展。当微控制器或芯片组没有足够的I/O端口,或当系统需要采用远端串行通信或控制时,GPIO产品能够提供额外的控制和监视功能。
由于LIN网络在汽车中一般不独立存在,通常会与上层CAN网络相连,形成CAN-LIN网关节点。
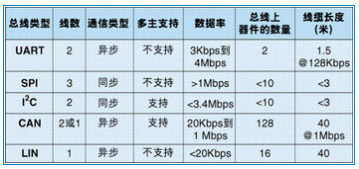
九、SPI、I2C、UART、CAN、LIN对比
十、参考文献
通信方式梳理:GPIO,I2C,SPI,UART,USART,USB的区别
通信方式梳理:GPIO,I2C,SPI,UART,USART,USB的区别
本文由 kelecn 创作,如果您觉得本文不错,请随意赞赏
博客内容遵循 署名-非商业性使用-相同方式共享 4.0 国际 (CC BY-NC-SA 4.0) 协议
本文永久链接是:https://kelecn.top/posts/55976/
您的喜欢是作者写作最大的动力!





