







基于OpenMV的无人驾驶智能小车模拟系统
简介:基于机器视觉模块OpenMV采集车道、红绿灯、交通标志等模拟路况信息,实现一辆能车道保持、红绿灯识别、交通标志识别、安全避障以及远程WiFi控制的多功能无人驾驶小车。
一、项目简介

项目地址:
编程软件:
| 硬件模块 | 编程软件 |
|---|---|
| OpenMV | 使用OpenMV官方的OpenMV IDE |
| ESP8266 | 使用Arduino官方的Arduino IDE |
| STM32 | 使用ARM官方的Keil uVision5(ARM版) |
功能介绍:
| 硬件模块 | 功能实现 |
|---|---|
| OpenMV | 主要是利用OpenMV进行路况信息(红绿灯、交通标志、车道)的采取,以及和STM32的通信,具体看OpenMV文件夹。 |
| ESP8266 | 主要是利用ESP8266与手机端进行远程的指令接收和数据交互,以及和STM32的通讯,具体看ESP8266文件夹。 |
| STM32 | 主要是通过ESP8266接收远程控制指令和处理路况信息,并根据这些指令数据进行实时的PID控制小车运动。具体看STM32文件夹。 |
欢迎各位去点点小星星哦~
二、硬件系统
本项目《基于OpenMV的无人驾驶智能小车模拟系统》,主要依靠机器视觉模块OpenMV通过图像处理的方式获取实时的路况信息,以及超声波传感器获取障碍物距离信息,得到的路况数据再通过串口传输到主控器STM32上面,STM32会将实时的路况信息处理成智能小车的运动控制指令,让智能小车实现红绿灯识别、交通标志识别以及车道实时保持的功能,还有STM32也会通过WiFi模块ESP8266与手机端进行路况数据和控制指令的远程交互。硬件系统框图如下:
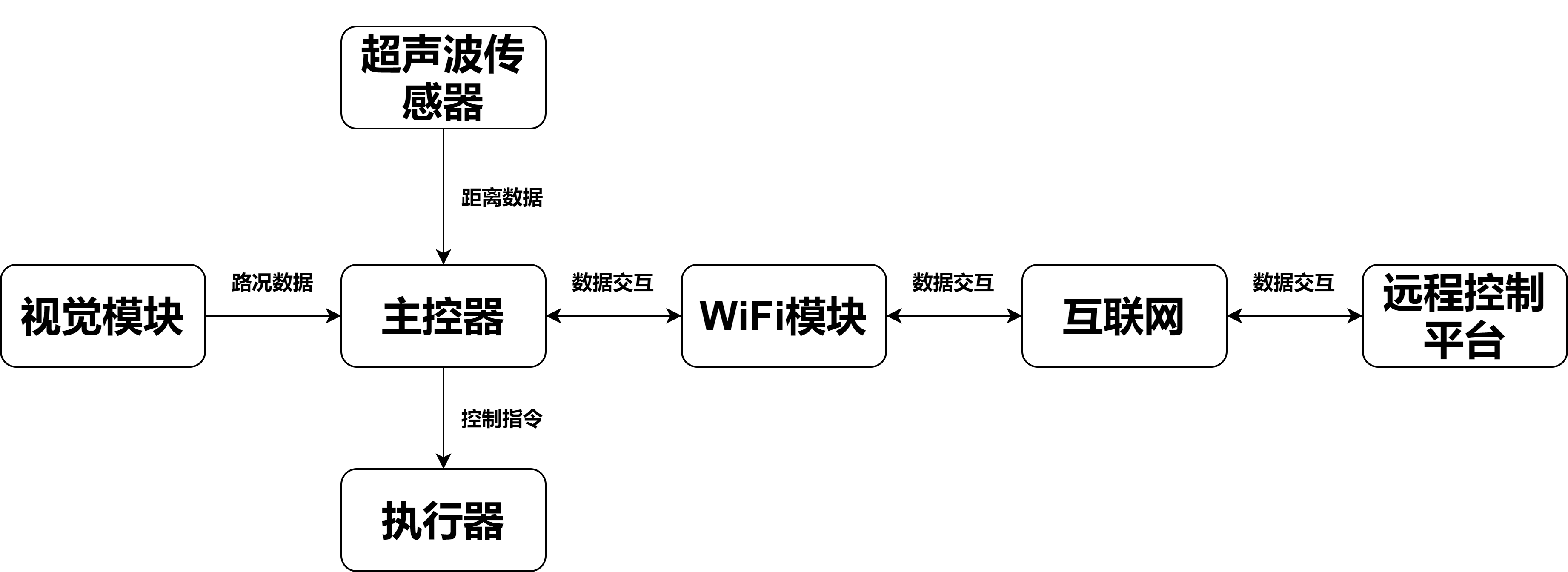
下面简单介绍一下,整个系统用到的硬件模块。
| 硬件模块 | 型号 |
|---|---|
| 主控器 | STM32F103ZET6(正点原子精英板F103) |
| 视觉模块 | OpenMV4 H7 PLUS(STM32H750VBT6 +OV7725) |
| 超声波传感器 | HC-SR04 |
| WiFi模块 | ESP8266 |
| 执行器 | 双路 H 桥电机驱动、直流电机、开发板自带的LED和蜂鸣器 |
| 控制平台 | 安装Blinker APP的安卓/苹果手机 |
| 其他 | 电源、模型车、导线若干等 |
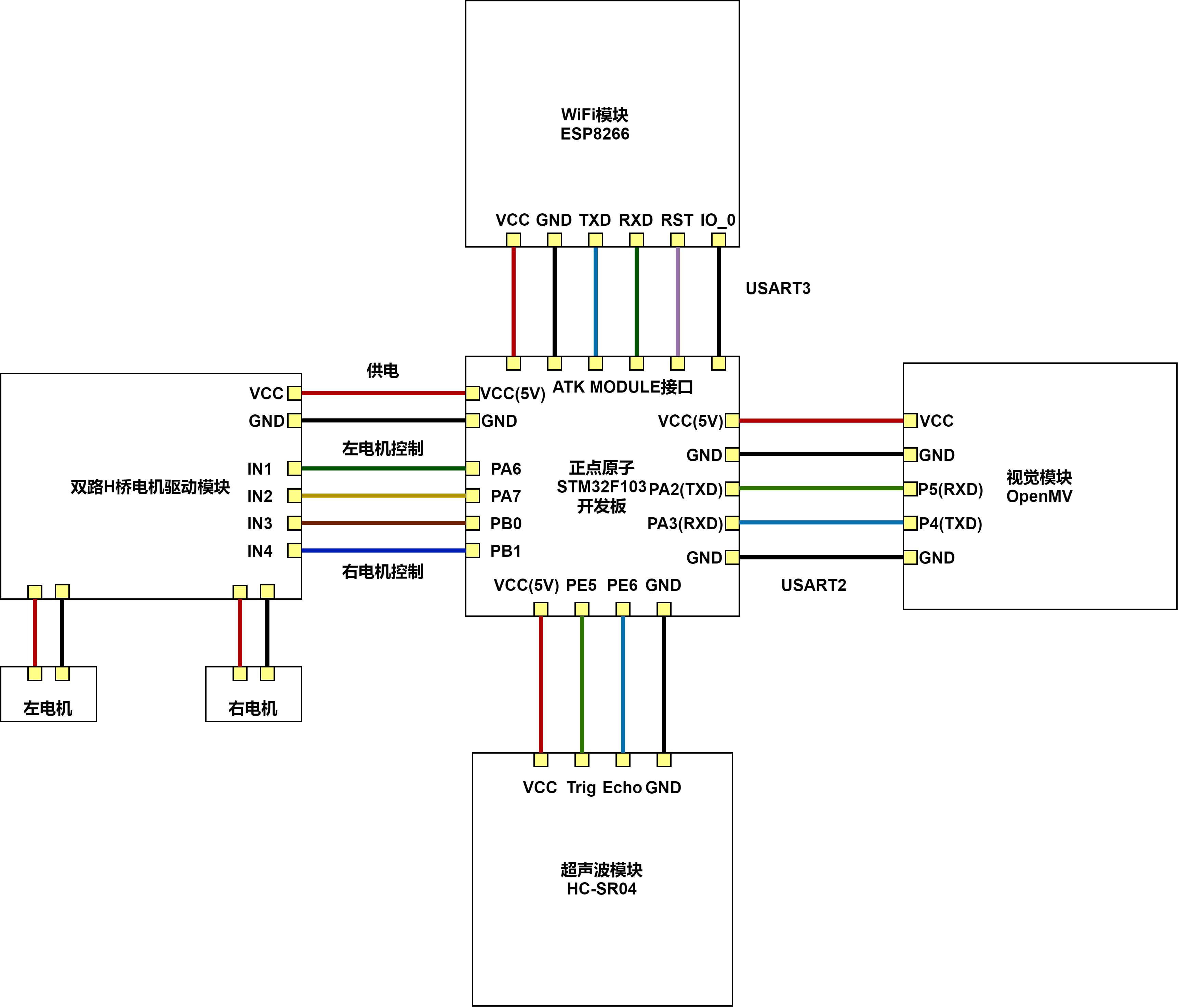
具体的硬件电路连接框图如下:
三、软件系统
1、OpenMV中的路况识别算法实现
本项目的主要路况数据信息都是基于OpenMV摄像头获取的图像进行图像处理得到的。要实现智能小车的自动驾驶行为,最起码要让小车识别到红绿灯、交通标志以及车道,后续主控器才能根据这些路况数据信息控制小车的运动。关于机器视觉模块OpenMV,之前我在《初探机器视觉模块OpenMV》里面已经介绍过了,这里不再赘述。
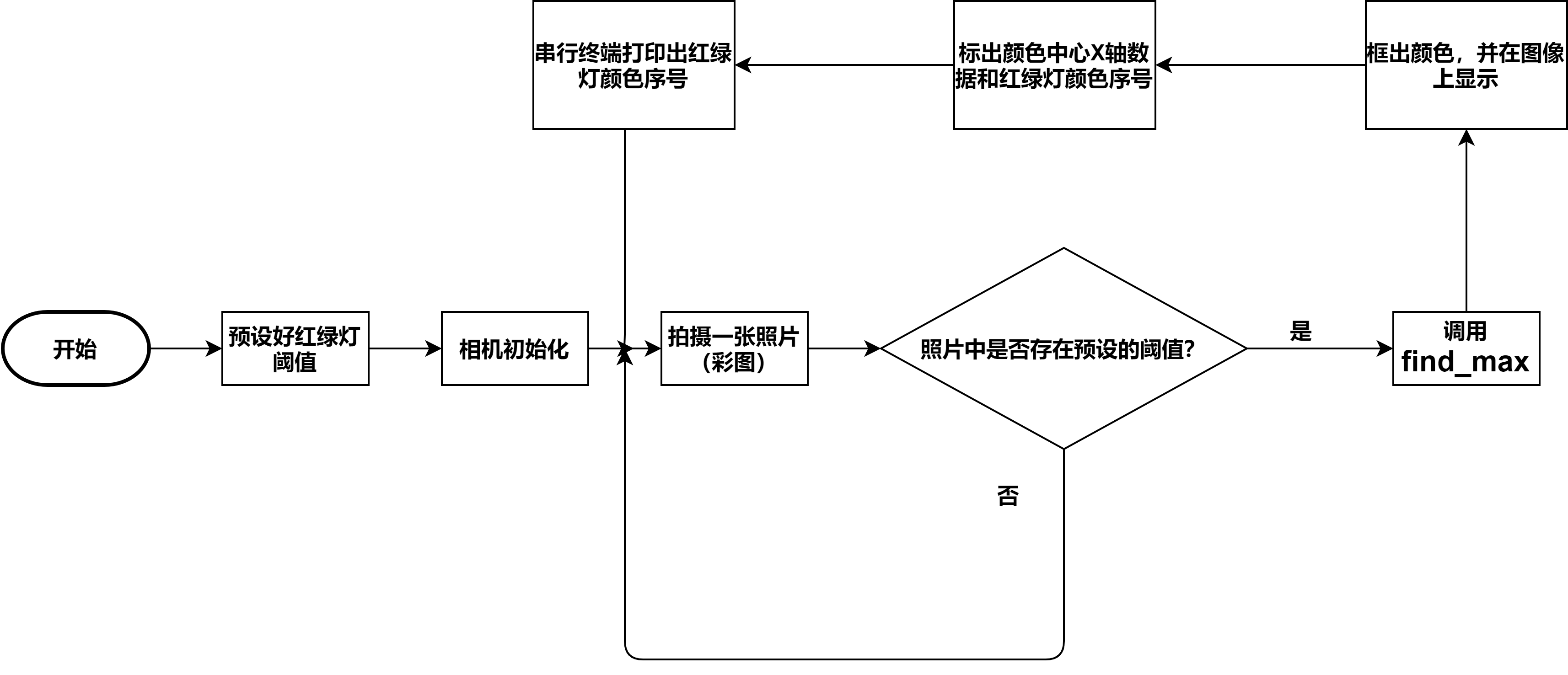
①红绿灯识别
主要是对摄像头每帧拍摄到的图像进行图像进行阈值处理,再进行判断出现的究竟是哪种红绿灯(红灯、绿灯、黄灯),然后再将这个判定结果和其他两个数据一起打包通过串口发送出去。
【程序流程图】
【主要程序】
1 | ###################################开始#################################### |
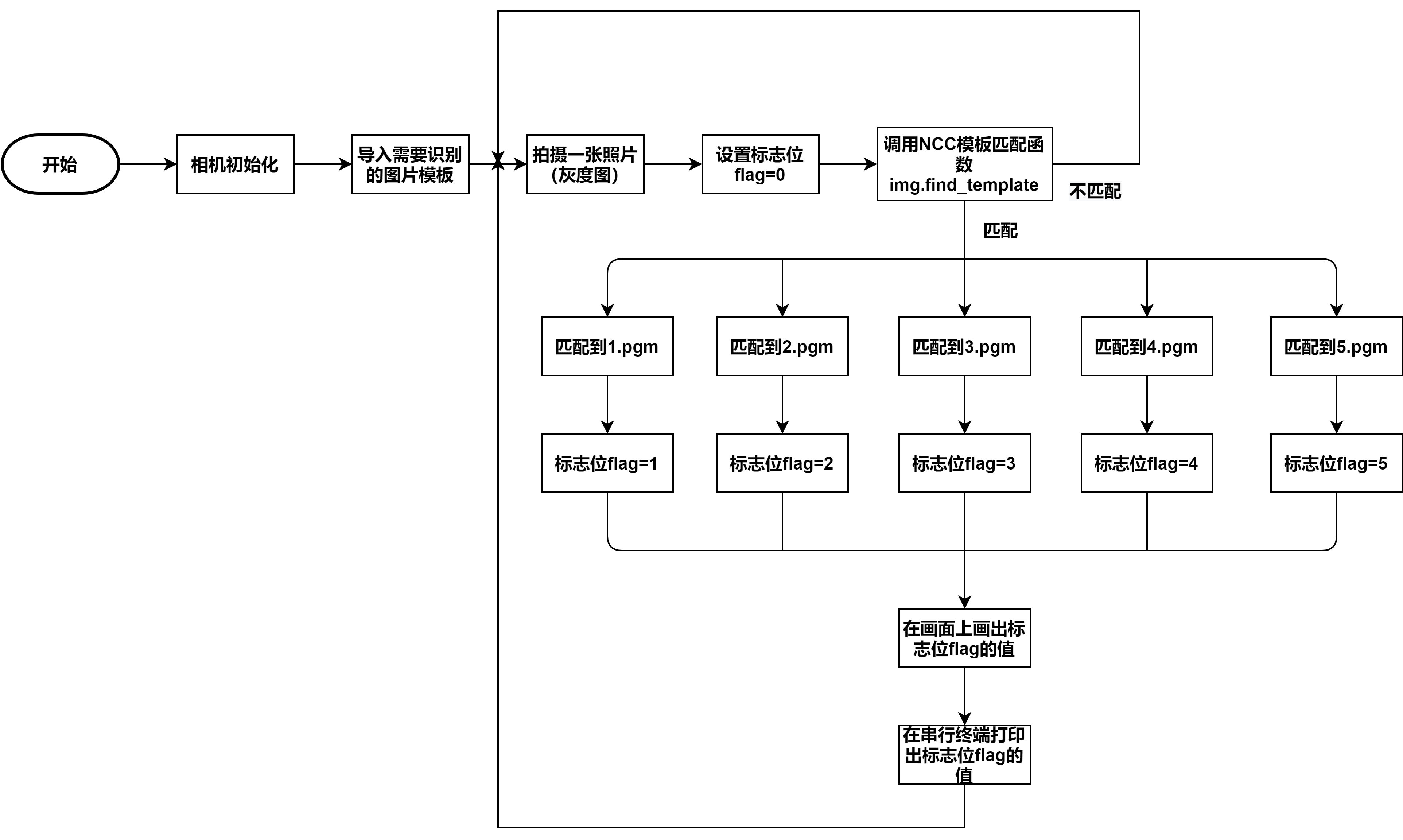
②交通标志识别
主要是利用NCC(Normalized Cross Correlation)归一化互相关算法来进行交通标志的图像识别与匹配。
【NCC算法】
NCC算法的基本实现原理:主要是通过求两幅大小相近的图像的相关系数矩阵来判别两幅图像是否相关。假设需要识别的初始图片$g$的大小为$m×n$,摄像头拍摄到的图片S的大小为$M×N$,其中的以$(x,y)$为左上角点与$g$大小相同的子图像为$S_{(x,y)}$。具体的利用NCC算法实现计算图像相似度的方法如下:
$\rho{(x,y)}$的定义为:随机变量$X$、$Y$的相关系数
$$
\rho{(x,y)}=\frac{\sigma(S_{x,y},g)}{\sqrt[]{D_{x,y}D}}
$$
式中:$\sigma(S_{x,y},g)$是$S_{x,y}$和$g$的协方差;
$D_{x,y}=\frac {1}{mn}\sum_{i=1}^{m} \sum_{j=1}^{n}{(S_{x,y}(i,j)-\overline S_{x,y})^2}$为$S_{x,y}$的方差;
$D=\frac {1}{mn}\sum_{i=1}^{m} \sum_{j=1}^{n}{(g(i,j)-\overline g)^2}$为$g$的方差;
$\overline g$为$g$的灰度均值;
$\overline S_{x,y}$为$S_{x,y}$的灰度均值;
将$D_{x,y}$和D代入$\rho{(x,y)}$,会有:
$$
\rho{(x,y)=\frac{ \frac {1}{mn}\sum_{i=1}^{m} \sum_{j=1}^{n}{(S_{x,y}(i,j)-\overline S_{x,y})(g(i,j)-\overline g)}}{\sqrt[]{\frac {1}{mn}\sum_{i=1}^{m} \sum_{j=1}^{n}{(S_{x,y}(i,j)-\overline S_{x,y})^2}}\sqrt[]{\frac {1}{mn}\sum_{i=1}^{m} \sum_{j=1}^{n}{(g(i,j)-\overline g)^2}}}}
$$
其中,相关系数$\rho{(x,y)}$满足:$\rho{(x,y)\le1}$。
$\rho{(x,y)}$越接近1,说明两幅图像越接近,也就是大图像的子集中越有可能包含有小图像。通过选取恰当的相关系数,我们就可以认为,相关系数大于该设定值的图像为所需识别的图像,也就是可以实现交通标识的识别。
【程序流程图】
【主要程序】
1 | ###################################开始#################################### |
③车道识别
主要通过OpenMV模块,识别并跟踪车道阈值,通过几何运算出小车与车道中线的角度(偏左为正、偏右为负),反馈出小车与车道的真实偏离情况(可量化),后续用于PID控制。
【程序流程图】
【主要程序】
1 | ###################################开始#################################### |
2、基于ESP8266的远程控制平台实现
主要是利用点灯科技-Blinker物联网平台搭建控制APP的UI界面,以及调用Blinker的控制代码,实现智能小车控制指令的下发与路况数据的上传。
【远程控制平台UI界面】

【UI配置代码】
直接使用 点灯.blinker APP导入配置代码即可获得和我一样的UI布局。
1 | {¨config¨{¨headerColor¨¨transparent¨¨headerStyle¨¨dark¨¨background¨{¨img¨¨assets/img/headerbg.jpg¨¨isFull¨«}}¨dashboard¨|{¨type¨¨btn¨¨ico¨¨fad fa-arrow-alt-up¨¨mode¨É¨t0¨¨前进¨¨t1¨¨文本2¨¨bg¨Ì¨cols¨Ë¨rows¨Ë¨key¨¨btn-go¨´x´Ì´y´Ï¨speech¨|÷¨clr¨¨#076EEF¨}{ßAßBßC¨fad fa-arrow-alt-down¨ßEÉßF¨后退¨ßHßIßJÌßKËßLËßM¨btn-back¨´x´Ì´y´¤CßO|÷ßPßQ¨lstyle¨É}{ßAßBßC¨fad fa-arrow-alt-right¨ßEÉßF¨右转¨ßHßIßJÌßKËßLËßM¨btn-right¨´x´Ï´y´ÒßO|÷ßPßQßUÉ}{ßAßBßC¨fad fa-arrow-alt-left¨ßEÉßF¨左转¨ßHßIßJÌßKËßLËßM¨btn-left¨´x´É´y´ÒßO|÷ßPßQßUÉ}{ßAßBßC¨fad fa-power-off¨ßEÉßF¨停车¨ßHßIßJÌßKËßLËßM¨btn-stoping¨´x´Ï´y´ÏßO|÷ßPßQßUÉ}{ßA¨tex¨ßF¨😋小车远程监控系统😋¨ßH´´ßJËßC´´ßKÍßLÊßM´´´x´Ë´y´ËßO|÷ßPßQßUÊ}{ßA¨num¨ßF¨障碍物距离¨ßC¨fad fa-route¨ßPßQ¨min¨É¨max¨¢1c¨uni¨¨cm¨ßJÉßKÍßLËßM¨num-distance¨´x´É´y´¤EßO|÷ßUÊ}{ßAßgßF¨小车偏移角度¨ßC¨fad fa-tachometer-alt-fast¨ßPßQßjÉßkº0ßl´º´ßJÉßKÍßLËßM¨num-angle¨´x´Í´y´¤EßO|÷ßUÊ}{ßAßgßF¨红绿灯(红1绿2)¨ßC¨fad fa-siren-on¨ßPßQßjÉßkËßl´´ßJÉßKËßLËßM¨num-led¨´x´É´y´ÏßO|÷ßUÉ}{ßA¨deb¨ßEÉßJÉßKÑßLÌßM¨debug¨´x´É´y´ÌßO|÷ßUÉ}{ßAßgßF¨WIFI信号¨ßC¨fad fa-signal-4¨ßP¨#389BEE¨ßjÉßkº0ßl¨dbm¨ßJÉßKËßLËßM¨num-wifi¨´x´Ï´y´ÉßO|÷ßUÉ}{ßAßBßC¨fad fa-repeat-alt¨ßEÊßF¨自动驾驶模式¨ßHßIßJËßKËßLËßM¨btn-auto¨´x´Ì´y´ÒßO|÷ßPßQßUÉ}÷¨actions¨|¦¨cmd¨¦¨switch¨‡¨text¨‡´on´¨打开?name¨¨off¨¨关闭?name¨—÷¨triggers¨|{¨source¨ß16¨source_zh¨¨开关状态¨¨state¨|´on´ß19÷¨state_zh¨|´打开´´关闭´÷}÷} |
【控制指令与监控数据】
| 名称 | 功能按钮/数据接收框的功能 | 数据键名 | 指令 |
|---|---|---|---|
| WiFi信号 | 接收WiFi信号数据 | num-wifi | — |
| 红绿灯数据 | 接收红绿灯数据(无0,红1,绿2) | num-led | — |
| 小车偏移角度 | 接收小车偏移角度 | num-angle | — |
| 障碍物距离 | 接收障碍物距离数据 | num-distance | — |
| 停车 | 发出停车指令 | btn-stoping | 0 |
| 前进 | 发出前进指令 | btn-go | 1 |
| 右转 | 发出右转指令 | btn-right | 2 |
| 左转 | 发出左转指令 | btn-left | 3 |
| 后退 | 发出后退指令 | btn-back | 4 |
| 自动驾驶 | 发出自动驾驶指令 | btn-auto | 5 |
| Debug | 显示收发数据的原始数据格式 | — | — |
【程序流程图】
【主要程序】
1 | /***********************************开始***********************************/ |
3、智能小车的无人控制方案实现
智能小车在接收到ESP8266的控制指令和OpenMV路况数据,会根据这些指令数据进行小车运动的控制。
【程序流程图】
【PID控制算法】
关于直流电机的PID调节,主要用来实现车道保持功能。通过OpenMV返回的偏转角度,进行实时调节电机PWM输出,使得偏转角度$Y=50$(也就是小车与中线的偏转角为0,由于之前为了传输方便整体加上了50)。故将设定值定为50,通过实时返回的$Y$值与50做差值运算,得到PID的输入偏差,通过位置式PID返回实时的PWM值。关于PID控制算法,之前也有介绍到,这里不再深入赘述。
$$
PWM=K_P\theta(t)+K_i\sum_{t=0}\theta(t)+K_d[\theta(t)-\theta(t-1)]
$$
其中为$\theta(t)$是本次OpenMV返回的偏移角度数据$Y$与50的差值,$\theta(t-1)$为上一个$Y$与50的差值。

【模拟环境】
【主要程序】





本文由 kelecn 创作,如果您觉得本文不错,请随意赞赏
博客内容遵循 署名-非商业性使用-相同方式共享 4.0 国际 (CC BY-NC-SA 4.0) 协议
本文永久链接是:https://kelecn.top/posts/51495/
您的喜欢是作者写作最大的动力!





